(一) 項目簡介
為了增強車輛對外界環(huán)境的感知能力,提高車輛智能駕駛能力����,我們計劃設計研發(fā)一款基于多傳感器融合的車輛避障算法。
我們的算法系統(tǒng)分為兩個部分,一是環(huán)境感知�,二是智能決策。汽車通過激光雷達�、攝像頭等模塊,獲取外界路況信息���,對道路障礙物進行識別�����。經過預測模塊的計算��,生成預測軌跡�。反饋控制模塊將軌跡點信息轉化為車輛油門�、剎車、方向盤等信息���,實現(xiàn)對車輛的控制�,使其按預定軌跡進行行駛��,實現(xiàn)對道路的識別以及智能避障��。
(二) 研究目的
隨著汽車數(shù)量的增加�,在給人類生產和生活帶來舒適與方便的同時��,交通事故也在不斷增加�����,據(jù)資料統(tǒng)計,世界上平均每分鐘就有一個人死于交通事故��,讓我們付出慘重的代價�。隨著科技的進步,智能汽車能夠自動避開道路中出現(xiàn)的行人和障礙物���,對于減少交通事故的發(fā)生保證人們的生命安全具有相當重要的意義�。
在“中國制造2025”重大戰(zhàn)略部署中���,對無人駕駛技術提出了高標準的要求�。無人駕駛汽車的研究能夠極大提高交通安全,而動態(tài)障礙物檢測跟蹤�、動態(tài)障礙物識別和動態(tài)車輛軌跡預測是無人駕駛汽車動態(tài)障礙物避撞涉及到的三項關鍵技術,不解決這些關鍵技術中存在的問題,無人駕駛智能車就無法在真實的交通環(huán)境中使用�。

圖2-1 大型車輛追尾事故
我們的無人車避障項目旨在通過多傳感器的協(xié)同使用,讓小車對當前路段的障礙物進行識別��,并進行及時避讓�����,來實現(xiàn)智能避障。同時我們的團隊也能緊跟互聯(lián)網(wǎng)科技的最前沿�,學習和研究最新的專業(yè)知識,努力提升自己的專業(yè)水平及提升團隊的協(xié)作能力���。
(三) 研究內容
一����、調研
分析當前主流的無人車技術路線及優(yōu)缺點���,確定所選用的技術方案�。
2018年3月23號��,一輛藍色的特斯拉Model X在進行自動駕駛時��,撞上中間隔離欄后汽車發(fā)生起火�,之后又被車道后方駛來的一輛馬自達和一輛奧迪相繼撞上。

圖2-2 特斯拉無人車事故
這起事故是由于無人車所搭載的毫米波雷達探測距離低以及容易受天氣的干擾����,沒有識別出前方靜止或低矮的障礙物所導致的。所以我們擬使用激光雷達配合攝像頭協(xié)同作用�����,來提高障礙物識別的準確度,避免此類事故的發(fā)生�����。
二���、環(huán)境感知
(1)激光雷達是一種采用非接觸激光測距技術的掃描式傳感器�����,其工作原理與一般的雷達系統(tǒng)類似,通過發(fā)射激光光束來探測目標���,并通過搜集反射回來的光束來形成點云和獲取數(shù)據(jù)��,這些數(shù)據(jù)經光電處理后可生成為精確的三維立體圖像�。
 
圖2-3 激光雷達 圖2-4 激光雷達內部結構圖

圖 2-5 基于激光雷達的地圖構建
(2)研究攝像頭的使用���,包括圖像的獲取�����、行人檢測�����、車輛檢測��、距離測量�����。通過深度學習的方法���,我們可以識別在行駛途中遇到的物體��,比如行人�、空曠的行駛空間�����、地上的標志����、紅綠燈以及旁邊的車輛等。由于行人以及旁邊的車輛等物體都是在運動的�����,我們需要跟蹤這些物體以達到防止碰撞的目的。

圖2-6攝像頭
光流分析法:目標與攝像頭之間發(fā)生相對運動的時候�,攝像頭所拍攝到的目標表面上的亮度會隨之變化。光流法主要有三個必要的組成要素�,首先,檢測對象與攝像頭之間必須存在相對的運動�����。其次檢測目標必須具備有很明顯的光學特點��。最后�,必須能夠形成空間之間的投影關系�,只有這樣圖像坐標上的點才能與世界坐標系上的點相互對應起來,才可以使目標被檢測出來���。
邊緣檢測:主要用來濾除圖像中灰度信息產生的突變�����。它具有方向和幅度���,與邊緣相平行的灰度值一般不會產生劇烈的變換�����,而與其相垂直的方向�����,灰度值的變化就會有很明顯的突變����,因此依據(jù)邊緣周邊灰度值的變換幅度就可以利用微分算子順利的將邊緣提取到�����,進而識別障礙物�,進行避障動作。目前比較常用的微分算子主要有兩種��,一階導數(shù)微分算子主要檢測的是邊緣的最大值�����,而二階導數(shù)微分算子主要檢測的是邊界的過零點�。

圖2-7障礙物邊緣檢測
三、智能決策
決策規(guī)劃控制部分,包含了無人車行為決策��、動作規(guī)劃以及反饋控制這三個模塊�。
感知模塊負責從傳感器數(shù)據(jù)中探測計算出周邊環(huán)境的物體及其屬性,這些物體信息經過預測模塊的計算���,生成預測軌跡傳遞給決策規(guī)劃控制系統(tǒng)中的行為決策模塊�����,動作規(guī)劃模塊負責具體的無人車的規(guī)劃問題�。反饋控制模塊直接與無人車底層控制接口對接���,負責消化上層動作規(guī)劃的輸出軌跡點��,結合車身屬性和外界物理因素的動力學計算����,轉換成對車輛油門�����、剎車���、方向盤的信號���,反饋控制模塊主要涉及對車輛自身控制,以及和外界物理環(huán)境交互的建模��。其流程如圖2-8所示���。
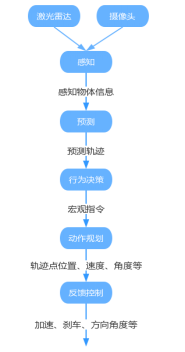
圖2-8 小車控制流程圖
(四) 國�����、內外研究現(xiàn)狀和發(fā)展動態(tài)
1�����、國內外研究現(xiàn)狀:
隨著技術的發(fā)展與時代的進步�,汽車行業(yè)正在朝著智能化方向發(fā)展�。而無人駕駛就是汽車智能化發(fā)展方向最重要的表現(xiàn)形式。無人駕駛汽車主要依靠車內的以計算機系統(tǒng)為主的智能駕駛儀來實現(xiàn)無人駕駛����,是計算機科學、模式識別和智能控制技術高度發(fā)展的產物�����,也是衡量一個國家科研實力和工業(yè)水平的一個重要標志,在國防和國民經濟領域具有廣闊的應用前景�����。而智能避障作為智能駕駛這一技術的重難點�,避障算法的優(yōu)劣直接決定著無人駕駛汽車的行駛是否安全,因而成為眾多無人駕駛汽車研發(fā)團隊的首要攻克對象�����。
美國特斯拉公司所研發(fā)的特斯拉Model S可實現(xiàn)自動泊出車庫�、自動保持跟車、自動更換車道與自動泊入車位這四大功能���。依靠毫米波雷達和雙目攝像頭的配合作為感知系統(tǒng)����,可自動更換車道�,實現(xiàn)智能避障。
在我國����, 清華大學研制成功了THMR-V型自主車輛,它不僅能夠在高速公路上行駛����,還可以在普通的道路上行駛。采用道奇7廂式汽車作為其車體�����,如圖2-9所示��。應用彩色攝像機和激光測距儀作為其環(huán)境感知系統(tǒng)����,另外還應用了差分GPS、磁羅盤和光碼盤作為其定位系統(tǒng)�����。依靠兩套計算機系統(tǒng)對視覺信息進行處理��,完成數(shù)據(jù)的融合以及行駛路徑的規(guī)劃�。它已經可以在校園內的道路上行駛和避障。

圖2-9 清華大學THMR-V型無人車
2�����、發(fā)展動態(tài):
對于車輛在行駛過程中的障礙物檢測是車輛感知道路環(huán)境信息研究領域中極其重要的環(huán)節(jié)。近年來����,國內在智能車輛的研究領域,針對道路環(huán)境中障礙物的檢測方法研究��,提出了相當多的處理算法和實施辦法,針對障礙物的檢測主要采用的方法有單目視覺�、立體視覺、激光雷達和多傳感器數(shù)據(jù)融合�。
基于單目視覺對障礙物的檢測技術,它主要通過安裝車體上的單個攝像頭,采集道路環(huán)境信息���。結合圖像處理技術對攝像頭采集到的圖像進行處理��,通過分析和對比攝像頭采集的連續(xù)幾幀圖像信息的變化來檢測障礙物,該方法的優(yōu)點采集到的道路信息比較豐富����,不需復雜的圖像匹配算法�,因此計算量相對較小,且使用和維護起來比較方便���。
基于立體視覺的障礙檢測技術是自主行駛車輛研究中經常采用的一種�����。目前使用比較廣泛的是雙目和三目攝像機這兩種,它的基本原理是:首先�����,采用參數(shù)性能比較相近的兩個或者多個攝像機在不同的方向同時采集道路環(huán)境信息����;然后��,依靠立體匹配的方法獲取障礙物體與圖像間存在的視差���;最后����,根據(jù)障礙物在圖像坐標系中的坐標����、視差以及攝像機的內外參數(shù)求得車體前方障礙物的距離。這個方法的不足之處在于計算方法十分復雜��,實時性比較差���。障礙物的檢測對系統(tǒng)的實時性要求非常高,經典的匹配算法不能夠很好的滿足其需求�。
基于激光雷達的障礙物檢測技術主要是通過車體搭載的激光雷達來對障礙物進行檢測和定位。激光雷達主要應用在障礙物定位����、速度計算和方位角測量等方面。但是,激光雷達技術也具有很多缺點�����,主要是體積過于龐大����,使用維護復雜,設備造價高昂�,其發(fā)射的激光束有較強的能量,這些因素都制約了激光雷達的廣泛應用��。
目前��,自主行駛車輛主要采用的方法是機器視覺���,依靠機器視覺獲取道路環(huán)境的圖像信息��。圖像的信息量十分豐富���,主要通過改善圖像處理的算法可以提高系統(tǒng)運行的實時性���。圖像信息對目標的描述十分完整,并且與人們的認知特點相同����,所以其優(yōu)勢非常明顯�。此外攝像機的價格普遍較低,維護比較簡單��,并且可以將環(huán)境信息實時的記錄下來供開發(fā)人員分析����,其傳輸方式也有很多種,比如wifi����、ZigBee和微波等。所以采用機器視覺采集和處理圖像信息并對障礙物進行定位是非常值得研究的���。當然��,它也存在著各種不足�����,容易受光照的影響��,圖像信息很大對其計算比較耗時���。
(五) 創(chuàng)新點與項目特色
1.采用實時系統(tǒng)采集激光雷達數(shù)據(jù)并進行三維成像�����;
2.采集攝像頭的圖像數(shù)據(jù)并通過光流和邊緣檢測算法來感知道路信息��;
3.采用多傳感器的方式提高準確度����,改進融合算法來平衡實時性和準確性�。
(六) 技術路線、擬解決的問題及預期成果
1����、技術路線
(1)調研分析現(xiàn)狀:通過網(wǎng)絡、書籍等進行調查研究���,分析當前智能車避障方法����,查找當前避障算法的缺點和不完善之處,確定具體的研究方向��,并做出具體的規(guī)劃�。
(2)模塊調試:根據(jù)調研結果,確定環(huán)境感知系統(tǒng)所用模塊���,并分模塊進行調試����,在計算機上做初步分析��。
(3)算法設計:確定圖像處理算法和系統(tǒng)所用融合算法���,將各模塊數(shù)據(jù)進行數(shù)據(jù)融合,模擬道路環(huán)境�。
(4)移植和整合:利用已有的嵌入式知識架構系統(tǒng)的硬件基礎,對建立的模型和算法進行移植并整合�,初步實現(xiàn)智能避障的功能。
(5)系統(tǒng)優(yōu)化環(huán)節(jié):進一步優(yōu)化算法��,讓小車在平穩(wěn)運行的情況下提高圖像識別效率和優(yōu)化數(shù)據(jù)融合����。
2�����、擬解決的問題
(1)提高障礙物檢測的實時性����。車輛在正常行駛時速度較快�,若障礙物的檢測速率慢,則極大的威脅著行駛安全����,因而需要提高系統(tǒng)的實時性。但由于傳感器自身原因��、CPU運行速度�、算法復雜度等影響,限制著障礙物的檢測速度���。我們擬選用高速CPU與攝像頭���、激光雷達,并通過一定程度的降低圖片像素來減少數(shù)據(jù)量����,配合合適的算法來提高系統(tǒng)障礙物檢測的實時性�����。
(2)提高障礙物檢測的準確率���。若車輛無法準確識別道路上的障礙物,則對行人���、對其他車輛���、對自身的安全都是一種極大的威脅。我們計劃通過多傳感器的協(xié)同使用來提高障礙物檢測的正確率����,同時通過提高圖片畫質�,增加清晰度,來實現(xiàn)對障礙物的準確識別�。
(3)平衡系統(tǒng)實時性與檢測準確性之間的矛盾。一方面�,要提高實時性,需盡量減少處理的數(shù)據(jù)量�,另一方面�,要增加檢測的準確性���,需要高精度的圖片進行處理�����,配合多個傳感器的數(shù)據(jù)來進行檢測����,而這又增加了數(shù)據(jù)處理所需的時間���。我們將設計合適的融合算法�����,來實現(xiàn)兩者之間的平衡�����。在保證障礙物檢測的準確性的同時�,又能在適當?shù)臅r間進行識別判斷�����,保證行車安全。
3��、預期成果
(1)撰寫項目總體報告��。
(2)實現(xiàn)搭載激光雷達和攝像頭的小車在存有障礙物的道路上自動行駛且能準確避障�����。
(3)申請軟件著作權一項�。
(4)爭取公開發(fā)表論文一篇
(七) 項目研究進度安排
2019年度:
2019年2月到2019年5月,調研分析現(xiàn)狀����,確定具體路線,做出預期問題的解決方案���。
2019年6月到2019年9月���,搜集并學習參考文獻,硬件系統(tǒng)設計及各功能模塊調試�。
2019年10月到2019年12月�,載人車各模塊調試,確保各個模塊的正常工作���,熟練掌握各個模塊的應用�。
2020年度:
2020年1月到2020年4月,組裝載人車各模塊并進行算法優(yōu)化�����、小車結構優(yōu)化�����。
2020年5月到2020年8月����,在測試道路上運行,測試載人小車各模塊是否能識別當前環(huán)境準確避障�。
2020年9月到2020年12月,優(yōu)化算法��,使載人小車更快識別當前環(huán)境,做出更準確的判斷�,最后撰寫論文并提交項目總結報告。
(八) 已有基礎
1. 與本項目有關的研究積累和已取得的成績
(1)本項目有關的研究積累:
① 在項目組成立之前���,項目組中大部分成員曾參與設計過電磁循跡小車,熟悉小車的工作原理��,并且在“恩智浦”智能車大賽中獲得過優(yōu)異成績。
② 項目組成員已了解了小車的組成結構����,能夠利用驅動板來驅動電機的工作。同時對PID控制算法有過一定的研究�����,懂得調節(jié)PID參數(shù)的基本方法����,實現(xiàn)用手柄控制小車行駛。如圖2-10所示��。

圖2-10 小車實物圖
③ 項目組成員在圖像處理方面有深刻理解���,參加過機器視覺方面的相關項目����,通過攝像頭取代人工對物料進行邊緣檢測�,從而提高生產效率。并掌握激光雷達的工作原理�����,實現(xiàn)道路信息的采集�,創(chuàng)建三維地圖。
(2)學生已取得的成績:
王俊杰:熟練掌握C語言和C++語言�����,熟練掌握STM32開發(fā)板�,能應用K60單片機進行系統(tǒng)設計,能夠使用Orcad和PADS繪制小車原理圖與PCB圖��。參與過2018年華南賽區(qū)“恩智浦”智能車大賽兩輪直立小車的設計和研發(fā)���。
2018年長沙理工大學第三屆“恩智浦杯”智能車大賽一等獎�。
2018年長沙理工大學第十三屆“物電杯”一等獎�。
2018年長沙理工大學第十二屆“電苑杯”二等獎。
2018年節(jié)能減排校園選拔賽二等獎�。
唐俊:掌握C語言,C++編程語言����,能夠使用AD繪制小車原理圖和小車PCB板,熟悉STM32 開發(fā)流程���,開發(fā)過基于STM32的單火線取電開關�����,熟練應用opencv進行圖像處理�。
2018湖南省物聯(lián)網(wǎng)大賽二等獎。
2018年長沙理工大學第十三屆“物電杯”一等獎�。
唐媛媛:熟悉掌握了stm32單片機的使用,學習了C��、C++編程以及模電�、數(shù)電知識,能夠使用OrCAD繪制原理圖和PADS繪制PCB板�����,參與過2018年華南賽區(qū)“恩智浦”智能車大賽兩輪直立小車的設計和研發(fā)�����。
2018年長沙理工大學第三屆“恩智浦杯”智能車大賽一等獎�����。
張煒健:擅于計算機編程���,C/C++語言基礎牢固��。已基本掌握單片機相應的知識�,對嵌入式開發(fā)與應用有一定的知識儲備和動手實踐能力。
2018年長沙理工大學第十三屆“物電杯”一等獎��。
侯鴻儒:能夠熟練使用C語言����、C++編程語言編寫具有一定復雜度的程序�,熟悉STM32單片機的使用。
2. 已具備的條件���,尚缺少的條件及解決方法
(1)已具備的條件
本團隊成員均有過一定的比賽�、科研經歷����,在小車控制方面有經驗,并且參加過機器視覺相關的項目����,能熟練使用攝像頭并進行圖像處理的工作。
本團隊獨立設計了一輛載人小車��,已經實現(xiàn)了在操作員的遠程操作下在道路上正常行駛,利用安裝在小車前端的攝像頭獲取道路信息����,并與上位機進行實時的信息傳輸。
(2)尚缺少的條件
① 尚未進行攝像頭與激光雷達的數(shù)據(jù)融合�,多傳感器的數(shù)據(jù)融合是我們算法的核心,利用傳感器之間的協(xié)同作用來提高障礙物的檢測正確率�����。
② 將預測軌跡點轉化為車輛控制信息的準確度有待提高���。由于車身屬性和外界物理因素的影響���,在軌跡點信息轉化時存在一定的偏差,需要分析車輛的具體結構以及外界的具體環(huán)境�����。
(3)解決方法
① 廣泛查閱資料����,尋找合適的方法對多傳感器的數(shù)據(jù)進行融合處理,提高車輛對外部環(huán)境的感知能力��。
② 對小車物理結構進行建模,分析油門��、剎車�、方向盤之間的關系,并對外界物理環(huán)境進行分析���,實現(xiàn)在不同環(huán)境下對小車的精準控制�。
|