(一) 項目簡介
本項目研究的危險品道路運輸實時監(jiān)控系統(tǒng)���,是根據(jù)金屬鈉運輸存儲過程中的相關環(huán)境參數(shù)����,完成硬件與軟件的設計與測試��。硬件是由狀態(tài)信息采集端與駕駛室端兩部分組成的車載終端���,軟件包括車載終端軟件與遠程終端軟件����。
在此基礎上���,項目組將完成各模塊功能測試與實地運輸實驗�,并設計危險預警實驗���,以檢驗系統(tǒng)的可操作性����。通過該系統(tǒng)的建立,旨在提高金屬鈉的運輸效率和安全性�,進而推廣應用至其他危險品道路運輸中。
(二) 研究目的
隨著國家經(jīng)濟建設的快速發(fā)展��,各行業(yè)對危險化學品的需求逐步增大�����,而在危險貨物的道路運輸過程中����,極易發(fā)生危險貨物道路運輸事故��,并對事故周邊人員的生命健康和財產(chǎn)安全以及生態(tài)環(huán)境造成嚴重危害�。我國針對危險品運輸制定了《危險貨物道路運輸安全管理辦法》,但是國內(nèi)危險品運輸企業(yè)及相關人員眾多�����,僅僅通過制定政策法規(guī)來遏制事故的發(fā)生遠遠不夠。由于危險品種類繁多,性質和存儲條件各不相同�,本項目以金屬鈉為例進行危險品道路運輸?shù)膶崟r監(jiān)控系統(tǒng)設計�,后期再進行推廣研究�。
金屬鈉作為一種性質活潑的化學物質�����,可用于制造氰化鈉���、過氧化鈉����、染料中間體���、醫(yī)藥中間體�����、海綿鈦等����,以及多種化學藥物或作還原劑�,在醫(yī)藥、農(nóng)業(yè)和攝影器材中應用廣泛�。同時金屬鈉也是一種危險化學品,有著易燃易爆���、劇毒等理化特性�����,在運輸過程中稍有不慎���,就會導致事故發(fā)生��,對國家和人民生命財產(chǎn)造成不可估量的損失��。
在金屬鈉運輸時�����,必須將金屬鈉存儲到液體石蠟或者煤油中�,但是由于車輛在行駛的過程中存在車廂內(nèi)溫度濕度變化�、行駛不穩(wěn)等原因�,不能完全杜絕由于泄露金屬鈉而導致事故的發(fā)生,因此��,研究一套能夠實時監(jiān)控車廂環(huán)境參數(shù)是否處于安全范圍的系統(tǒng)變得尤為重要����。
本項目研究的危險品道路運輸實時監(jiān)控系統(tǒng)以硬件為骨肉��,軟件為靈魂��,各部分介紹如下:
硬件(車載終端)
①狀態(tài)信息采集端:置于危險品存儲環(huán)境中����,通過狀態(tài)信息采集端的各個傳感器子模塊采集數(shù)據(jù)�����,包括溫度�����、濕度�、車輛加速度以及氫氣濃度的數(shù)據(jù)的采集,確定金屬鈉即將引發(fā)危險的環(huán)境參數(shù)���。
②駕駛室端:車載終端的一部分��,包括CDMA無線通信模塊����、存儲模塊、LED液晶顯示模塊����、語音模塊和485總線控制器。此外�����,為滿足對車輛的實時定位�,在車載終端上加入GPS芯片,通過無線傳輸技術將車輛的地理位置發(fā)送至遠程控制中心����,便于在發(fā)生事故后,及時救援��。
軟件
①車載終端軟件:實現(xiàn)對傳感器子模塊采集的危險品周圍環(huán)境參數(shù)進行數(shù)據(jù)處理和傳輸��,并將數(shù)據(jù)通過CDMA模塊發(fā)送給遠程監(jiān)控中心����,同時將傳感器信息實時顯示在顯示屏上�����。
②遠程中心軟件:可獲取車載終端通過CDMA模塊發(fā)送的數(shù)據(jù),并且存入數(shù)據(jù)庫以便歷史查詢或事故發(fā)生后的溯源,實現(xiàn)對數(shù)據(jù)的存儲、管理與可視化��。
最終系統(tǒng)運行流程如圖2-1所示����,通過該系統(tǒng)的建立�����,實現(xiàn)對金屬鈉道路運輸全程的可知�����、可視�、可控化管理��,為金屬鈉運輸人員與管理人員提供一定的決策支持��,提高金屬鈉的運輸效率和安全性。

圖2-1 危險品道路運輸實時監(jiān)控系統(tǒng)示意圖
(三) 研究內(nèi)容
3.1金屬鈉性質分析并確定監(jiān)控參數(shù)
通過查閱《常見?�;贩N類及安全運輸知識》��、《金屬鈉的性質與應用》等文獻���,確定金屬鈉存儲環(huán)境的上下限參數(shù)。了解得知�,保證金屬鈉的安全運輸需控制如下四個參數(shù):
①溫、濕度:由金屬鈉的性質分析可知���,金屬鈉極易與空氣中的水發(fā)生反應而釋放出熱量和易燃易爆氣體氫氣��,因此在運輸過程中需要嚴格把控存儲環(huán)境的溫濕度,做到對環(huán)境參數(shù)的實時監(jiān)控。由國家標準《GB17914-2013易燃易爆性商品儲存養(yǎng)護技術條件》可知����,金屬鈉的存儲條件為溫度不超過35℃��,空氣濕度不超過80%���,運輸車輛的車廂環(huán)境也需要嚴格遵守此條件�,否則金屬鈉極易與空氣中的水發(fā)生反應而釋放出熱量和易燃易爆氣體氫氣,反應方程如(3.1)所示���。
2Na+2H2O=2NaOH+H2 (3.1)
②氫氣濃度:金屬鈉與水反應產(chǎn)生氫氣而空氣中氫氣含量極低���,僅有0.5ppm(體積濃度兩百萬分之一)的原理,可以通過監(jiān)測空氣中的氫氣濃度判定金屬鈉是否與水接觸并發(fā)生了反應��。同理�����,可通過檢測車廂的溫濕度判斷是否存在安全隱患����。
③振動:在金屬鈉運輸時,振動也是一個十分關鍵的參數(shù)�����,若運輸車輛的振動過于劇烈�����,則可能會導致側翻或者危險品泄露等事故���,進而對周圍的人民和環(huán)境造成巨大的威脅����,因此,有必要在金屬鈉運輸車輛內(nèi)安裝加速度傳感器對車輛的振動和姿態(tài)進行實時監(jiān)測�����。
在進行資料的充分收集之后�����,采用控制變量法制定多套參數(shù)方案�。在影響金屬鈉存儲的主要因素中,溫度濕度較容易確定和控制�,故將溫濕度作為定量,加速度與氫氣濃度作為雙重變量制定方案����。在確保安全的前提下�����,結合傳感器對公路運輸過程進行模擬實驗,在實驗方案中找出金屬鈉在車廂中安全存儲參數(shù)的范圍����。
3.2危險品環(huán)境參數(shù)采集模塊的研究
針對現(xiàn)有的公路運輸危險品安全檢測系統(tǒng)進行相關資料的檢索以及金屬鈉的特性,對現(xiàn)有的溫濕度檢測器�����、加速度傳感器以及氫氣濃度檢測器進行參數(shù)的重新設置����,主要包括如下四個方面:
① 溫度傳感子模塊設計
由金屬鈉的性質分析可知,在金屬鈉運輸時�,車廂溫度應不超過35℃,但是金屬鈉與水反應會釋放出大量的熱量并導致周圍環(huán)境溫度急劇升高���,在97℃時�,金屬鈉會融化變?yōu)橐簯B(tài)���,因此����,選擇的溫度傳感器測溫上限應該高于97℃。項目組基于DS18B20設計了溫度傳感器子模塊����,圖3-1為DS18B20溫度傳感器實物圖,圖3-2為最終設計的DS18B20與Atmege88通信電路圖���。
 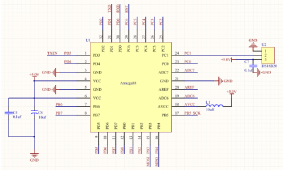
圖3-1 DS18B20實物圖 圖3-2 DS18B20與Atmege88通信電路圖
② 濕度傳感器子模塊設計
用于監(jiān)測車廂環(huán)境的濕度傳感器最大可測量濕度應該高于80%��,項目組選用DHT11濕度傳感器設計了濕度傳感器子模塊�����。DHT11是一款內(nèi)含已校準的溫度與濕度敏感元件的復合數(shù)字傳感器��,DHT11的實物如圖3-3所示�,其封裝形式為單排4引腳封裝����,采用單線制串行接口�,能夠進行雙向數(shù)據(jù)通信�����。最終設計的DHT11與ATMEGA88通信電路如圖3-4所示����。
 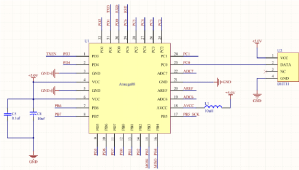
圖3-3 DHT11濕度傳感器實物圖 圖3-4 DHT11與Atmege88通信電路圖
③ 加速度傳感器子模塊設計
車輛在一般路面上行駛時�,振動加速度一般不超過1g,在通過減速帶和凸塊時�,振動加速度可能達到38,因此�,加速度傳感器量程應超過3g。項目組利用飛思卡爾公司的MMA7361加速度傳感芯片設計了加速度傳感器子模塊����。其實物圖如圖3-5所示,本設計采取5V供電����。最終設計的Atmega88與MMA7361模塊通信電路如圖3-6所示。
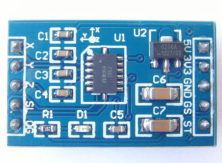 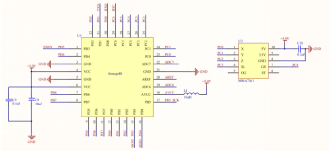
圖3-5 MMA7361實物圖 圖3-6 MMA7361與Atmege88通信電路圖
④ 氫氣濃度傳感器子模塊設計
氫氣濃度是金屬鈉運輸監(jiān)控最關鍵的參數(shù)���,根據(jù)車廂內(nèi)的氫氣濃度可以直接判斷所運輸?shù)慕饘兮c是否與空氣中的水蒸氣接觸并發(fā)生了反應�。本研究選用MQ-8氫氣傳感器模塊對氫氣濃度進行采集�����。MQ-8氫氣傳感器模塊的氣敏元件為在清潔空氣中電導率較低的二氧化錫(SnO2),二氧化錫的導電率將隨所處環(huán)境氫氣濃度的增加而變大����。 MQ-8傳感器模塊的實物如圖3-7所示,最終設計的MQ-8與Atmega88的通信電路如圖3-8所示�。
 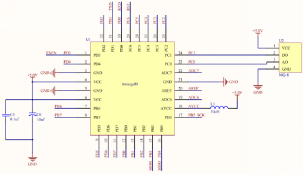
圖3-7 MQ-8系列傳感器模塊實物圖 圖3-8 MQ-8與Atmege88通信電路圖
3.3 GPS/BDS雙模定位模塊電路設計
系統(tǒng)利用GPS/BDS雙模定位模塊實時采集危險品道路運輸車輛的位置信息。雙模定位能夠提高系統(tǒng)的定位精度��?�?紤]到系統(tǒng)的高性價比���、與監(jiān)控的準確性��。本項目組選用了UM220雙模定位模塊��,其實物圖3-9和內(nèi)部結構圖3-10如下���。
 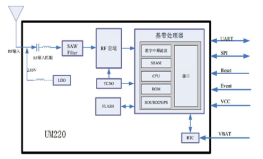
圖3-9 UM220實物圖 圖3-10 UM220內(nèi)部結構圖
3.4人性化語音播報與預警模式
查閱有關語音播報與檢測預警的資料,區(qū)分傳統(tǒng)的單一傳感器性質的預警器���。結合數(shù)據(jù)采集模塊����,研究如何做到選擇性地播報數(shù)據(jù)以及如何做到將預警器和多種不同類型的數(shù)據(jù)相結合�,及時預警和播報有用信息。
3.5 后臺管理實時數(shù)據(jù)存儲與傳輸設計
要實現(xiàn)對危險品道路運輸?shù)膶崟r監(jiān)控����,項目組把系統(tǒng)分為車載終端和遠程監(jiān)控中心,車載終端采集上述車輛位置���,危險品周圍環(huán)境參數(shù)�,并通過CDMA模塊傳輸?shù)竭h程監(jiān)控中心����,遠程監(jiān)控中心將這些數(shù)據(jù)進行存儲和管理。項目組選用了ME99T嵌入式CDMADTU搭建通信鏈路����,它內(nèi)置了相互獨立的IP模塊和華為MC703CDMA模塊,內(nèi)部結構圖如圖3-11所示����。
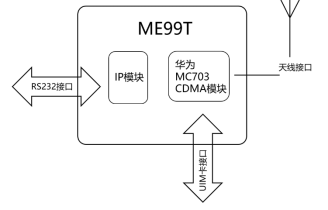
圖3-11 ME99T嵌入式內(nèi)部結構圖
(四) 國、內(nèi)外研究現(xiàn)狀和發(fā)展動態(tài)
4.1危險品在運輸過程中的監(jiān)控預警研究
Laarabi和Roncoli[1]認為目前危險貨物運輸工程依舊是理論性的,對實際情況很難實現(xiàn)����,于是做了一種可視化的DGT仿真系統(tǒng)的體系結構,用于提供測試這些作品的條目����。
肖茂彩和張冠湘[2]對危險品在運輸?shù)娘L險預警提出了層次分析法、ISM解釋結構模型��、因果貝葉斯網(wǎng)絡模型來建立風險預估模型����,并且對危險品事故原因做出了總結。
魯逸丹[3]從事故預防和風險控制的“3E”理論和“4M”要素考慮�,運用德爾菲法和問卷調(diào)查法篩選和優(yōu)化指標,構建了道路危貨運輸風險預警的指標體系����。使用層次分析法(AHP)計算各指標的權重,最終形成風險預警數(shù)學模型�����。并選取了30個不同場景���,對各個場景下的指標數(shù)據(jù)進行統(tǒng)計分析��。
喬通和許志俊等[4]采用單目視覺算法��,通過安裝在智能車輛上的攝像頭采集道路前方車輛信息����,以及對多特征信息融合技術對被測車輛型號進行識別和定位��,完成對前方車距的計算�,讓其它車輛注意危險品車輛。
4.2 危險品運輸中路線選線問題
曾琳惠[5]分析了易燃易爆品運輸過程的危險因素����,建立了易燃易爆品路線選擇體系,并采用層次分析法和專家調(diào)查法對指標體系進行了定性與定量的分析��。
任長興[6]從危險品�����、道路特征��、傷亡人員�、運輸環(huán)境、應急能力、運輸成本等方面構建了危險品道路運輸路徑優(yōu)化評價指標體系�,重點研究了單目標比例權重法選線和多目標Pareto最優(yōu)化選線兩種路徑優(yōu)化方法,并分析了氣象條件對路徑優(yōu)化選線的影響���。
鄺修遠[7]構建了以運輸成本和運輸風險為優(yōu)化目標的路徑選擇與優(yōu)化模型�����,使用加權平均法將多目標優(yōu)化函數(shù)轉化為單目標優(yōu)化模型�����,采用了改進的遺傳算法(ClvGA)對危險貨物運輸路徑選擇與優(yōu)化模型進行求解���。
代存杰和李引珍等[8]針對多種類型的危險品在有風險控制的路網(wǎng)內(nèi)運輸問題,設計了一種雙向拓撲搜索算法�,通過刪除原路網(wǎng)中非可行路段和非可用節(jié)點,生成不同類別危險品的剩余運輸網(wǎng)絡���,利用改進的標號算法���,在剩余網(wǎng)絡中搜索不同準則下的最優(yōu)路徑。
4.3 危險品事故應急處理的研究
孔祥盈[9]以我國水路危險品運輸?shù)陌踩O(jiān)管為基礎��,剖析了我國水路危險品運輸安全監(jiān)管過程中存在的問題及不足。以發(fā)達國家成熟實用的監(jiān)管策略為藍本����,結合我國水路危險品運輸安全監(jiān)管現(xiàn)狀,探索了行之有效的水路危險品運輸安全監(jiān)管策略���。
錢高璐[10]開發(fā)了與應急準備管理系統(tǒng)相適應的平臺��,利Visual Basic 6.0作前臺開發(fā)�,并將Structured Query Language開發(fā)數(shù)據(jù)庫���,采用Map Objects控件調(diào)用地圖,編制了高速公路危險貨物運輸應急準備管理系統(tǒng)�����。
鮑平鑫[11]設計了危險品鐵路運輸預警應急指揮系統(tǒng)總體框架�����,構建基于自組織理論的危險品鐵路運輸預警應急系統(tǒng)模型�����,并對危險品鐵路運輸預警應急指揮系統(tǒng)處理流程進行了研究。
葉峰梅[12]分析了國內(nèi)外危險品運輸管理的狀況���,提出了一種基于信息交互的管理模式�����,以提高危險品運輸管理的有效性����。應急管理主要是考慮將危險貨物運輸監(jiān)管系統(tǒng)與現(xiàn)有救援平臺進行有效地結合�����,將監(jiān)管與危險貨物運輸突發(fā)事故進行關聯(lián)�����,在事故發(fā)生的第一時間�,將危險事故信息等傳輸至平臺,從而為準確而及時的救助提供技術支撐��,提高救助的效率和效果����。
參考文獻
[1]Roncoli, C., Bersani, C., Sacile, R.. A decentralised control model for the risk-based management of dangerous good transport flows on road[P]. Systems Conference (SysCon), 2012 IEEE International,2012.
[2]肖茂彩,張冠湘.危險品管理政策及風險預警研究[J].物流工程與管理���,2018,40(09):162-164+188.
[3]魯逸丹. 道路危險貨物運輸車輛的實時風險預警方法研究[D].中國地質大學(北京)�,2018.
[4]喬通,許志俊�,韓家坤,方志����,胡晨暉,張丹.長途客車對危險品運輸車的智能識別預警系統(tǒng)[J].科技展望���,2016���,26(16):120�。
[5]曾琳惠. 易燃易爆品道路運輸路線選擇問題研究[D].西南交通大學,2011.
[6]任常興. 基于風險分析的危險品道路運輸路徑優(yōu)化方法研究[D].南開大學,2007.
[7]鄺修遠. 危險貨物道路運輸風險分析與路徑選擇研究[D].北京交通大學����,2018.
[8]代存杰,李引珍�,何瑞春,馬昌喜.危險品運輸路徑多準則優(yōu)化模型及求解算法.
[9]孔祥盈. 我國水路危險品運輸安全監(jiān)管問題研究[D].大連海事大學���,2016.
[10]錢高璐. 高速公路危險貨物運輸應急準備管理系統(tǒng)研究[D].長安大學�����,2016.
[11]鮑平鑫,王飛,辛海.危險品鐵路運輸預警應急指揮系統(tǒng)框架設計[J].軍事交通學院學報,2015,17(02):1-6.
[12]葉峰梅. 基于信息交互的危險貨物道路運輸安全監(jiān)管及應急管理研究[D].華東理工大學,2015.
(五) 創(chuàng)新點與項目特色
(1)本項目組設計的危險品實時監(jiān)控系統(tǒng)旨在實現(xiàn)對危險品在運輸途中的可視化管理���,真正意義上提高運輸?shù)陌踩浴?/span>
(2)針對于危險品鈉的實時監(jiān)控系統(tǒng)設計對所需硬件進行了合理選型����,完成了車載終端和危險品狀態(tài)信息采集兩部分的最優(yōu)硬件搭配設計����。
(3)針對GPS模塊的靜態(tài)漂移現(xiàn)象,預計采用靜態(tài)漂移修正算法�����,其應用能有效減小定位模塊的靜態(tài)漂移�,使得定位更加準確,保證危險品道路運輸實時在線監(jiān)控系統(tǒng)能正常工作的同時��,對車輛位置�、危險品溫濕度等參數(shù)進行有效監(jiān)控,并使得參數(shù)的數(shù)據(jù)交互更加穩(wěn)定可靠���。
(六) 技術路線����、擬解決的問題及預期成果
6.1項目的技術路線
本項目采用模塊化思想,從硬件到軟件的系統(tǒng)設計��,從模塊到整體的調(diào)試方法�����,使得成果具有良好的可拓展性�����,技術路線見下圖:

圖6-1 技術路線圖
6.2 預期目標
(1)完成金屬鈉運輸?shù)男畔⒉杉伺c駕駛室端硬件設計與實現(xiàn)�,為實時監(jiān)控系統(tǒng)的設計與開發(fā)打下基礎,進而推廣至對危險品道路運輸全程的可知��、可視�����、可控化管理��,提高危險品道路運輸效率與安全性���;
(2)完成車載終端軟件設計���,實現(xiàn)對傳感器子模塊采集的危險品周圍環(huán)境參數(shù)進行數(shù)據(jù)處理和傳輸,并將數(shù)據(jù)通過CDMA模塊發(fā)送給遠程監(jiān)控中心�,同時將傳感器信息實時顯示在顯示屏上;完成后臺軟件設計����,實現(xiàn)能接受車載終端軟件傳送的數(shù)據(jù)并進行本地存儲與歷史查詢。
(3)實現(xiàn)以語音播報的方式進行危險預警�,在整個系統(tǒng)中貫穿使用,使駕駛員無需觀察顯示屏即可了解到系統(tǒng)實時的工作狀態(tài)�����。
發(fā)表學術論文2~3篇���,申請國家專利1~2項��。
(七) 項目研究進度安排
2019年3月-2019年4月:
調(diào)查國內(nèi)外相關文獻��,了解現(xiàn)有研究的缺點與不足�,提出本項目的研究目標。
2019年4月-2019年6月:
從危險品道路運輸實時監(jiān)控的原理出發(fā)�,確定系統(tǒng)需要涉及的關鍵技術,分析這些關鍵技術的研究現(xiàn)狀并選定系統(tǒng)最終采用的技術方案��,基于選定的技術方案�����,以模塊化的設計思想確定系統(tǒng)的總體集成方案�。
2019年7月-2019年12月:
進行系統(tǒng)的模塊選用及硬件、軟件設計
2020年1月-2020年2月:
在確定各模塊正常后����,對各個模塊進行試驗以及整體試驗,產(chǎn)品改善�,給出實驗結果。
2020年3月-2020年6月:
項目結果整理以及成果發(fā)表��,提交項目結題報告�。
(八) 已有基礎
1. 與本項目有關的研究積累和已取得的成績
項目組欲建立的危險品實時監(jiān)控系統(tǒng)是依托于前期冷鏈物流運輸信息系統(tǒng)的研究成果之上。項目組成員所設計的智能冷鏈物流信息系統(tǒng)主要分為傳感器數(shù)據(jù)監(jiān)測��、云端數(shù)據(jù)處理�����、信息表征與應用三個部分����,而在本項目中無論是以傳感器為主的車載終端監(jiān)測數(shù)據(jù),還是通過碼分多址技術(CDMA)將數(shù)據(jù)發(fā)送至遠程終端進行數(shù)據(jù)備份和可視化分析都與智能冷鏈物流項目的技術息息相關��。此節(jié)專門介紹智能冷鏈物流信息系統(tǒng)的已有成果�����。
8.1.1檢測信息反饋系統(tǒng)
(1)設計思路
本項目研究的信息監(jiān)測反饋系統(tǒng)���,主要由傳輸終端��、網(wǎng)絡通信和數(shù)據(jù)中心三部分組成���。
? 傳輸終端從監(jiān)測器設備中接收到的數(shù)據(jù)打包,可以在手機APP上實時查看貨物信息�,同時可以傳送到控制模塊經(jīng)過分析、處理后��,通過內(nèi)嵌TCP/IP協(xié)議GPRS模塊接入GPRS網(wǎng)絡���,將車輛上的貨物的實時信息和車況信息傳送到數(shù)據(jù)中心進行對應顯示�����、儲存管理�。團隊已設計的監(jiān)測器是以單片機STC89C51為核心的恒溫箱監(jiān)測器?;灸K包括:CPU控制模塊、溫濕度模塊��、時鐘模塊���、光強測量模塊���、4*4矩陣鍵盤控制制模塊、Wi-Fi模塊和GPRS模塊��。如圖8-1為監(jiān)測器的實物圖�����,圖8-2為監(jiān)測器的細節(jié)圖���。8-3為該監(jiān)測器的設計電路圖���。
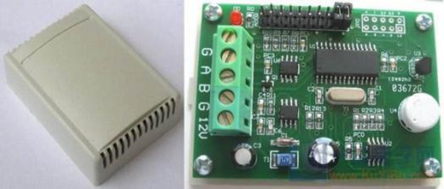
圖8-1 監(jiān)測器實物圖 圖8-2 監(jiān)測器細節(jié)圖

圖8-3 監(jiān)測器設計電路
? 數(shù)據(jù)中心是數(shù)據(jù)資源的集中����,它主要功能是接收處理終端傳輸?shù)臄?shù)據(jù)進行集中管理����,并對歷史數(shù)據(jù)可以隨時下載��,及時了解各個貨車情況����。通過登錄平臺及時獲取機車作業(yè)數(shù)據(jù),從而為后續(xù)工作提供依據(jù)�����。
? 當數(shù)據(jù)中心和終端傳輸設備進行有效通信時��,數(shù)據(jù)中心則利用HTTP協(xié)議和云服務平臺對數(shù)據(jù)接收���、數(shù)據(jù)分類以及對數(shù)據(jù)儲存的有效管理�����。當處理器接收到數(shù)據(jù)時傳送到GPRS網(wǎng)絡上�����,與數(shù)據(jù)中心形成通訊鏈路���,隨時接收傳輸終端設備發(fā)送的數(shù)據(jù)����,能夠分別在顯示功能模塊和數(shù)據(jù)管理模塊上實時準確的存儲在平臺上�,冷鏈監(jiān)控系統(tǒng)構架如圖8-4所示。
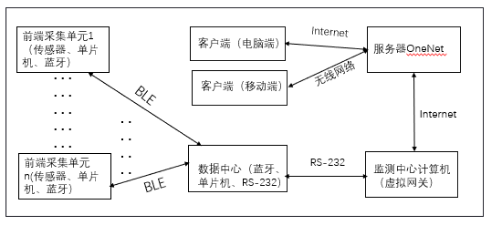
圖8-4 冷鏈監(jiān)控系統(tǒng)構架圖
(2)監(jiān)測信息反饋系統(tǒng)的相關技術組成
監(jiān)測器終端可放置于運輸車輛內(nèi)����,也可以當至在倉庫內(nèi)用于實時顯示保溫箱內(nèi)各模塊采集到的參數(shù)信息,各保溫箱的數(shù)據(jù)經(jīng)過處理器處理后通過GPRS網(wǎng)絡傳送至監(jiān)控中心進行監(jiān)控管理���。其中用到的關鍵技術包括GPS導航定位技術��、RFID射頻識別技術��、GPRS無線通訊技術��、溫度檢測技術等����。在對各模塊基本功能與原理的研究基礎上,針對車載終端專門用到的技術�����,擴展了硬件電路的設計����,最終通過嵌入式開發(fā)技術�����、傳感器技術和互聯(lián)網(wǎng)通訊技術完成了終端的設計��。
終端完成的功能包括溫濕度數(shù)據(jù)采集與顯示�����、GPS經(jīng)緯度�����、海拔�、時間信息采集與顯示、RFID射頻識別模塊讀寫貨物數(shù)量信息�、信息發(fā)送至監(jiān)控中心服務器或用戶移動設備終端��。
2. 已具備的條件�,尚缺少的條件及解決方法
8.2.1已具備的條件
(1)項目組成員熟悉本項目研究涉及到的相關設備的使用�����,為本項目的開展奠定了堅實基礎�。申請項目依托長沙理工大學省級眾創(chuàng)空間基地、物流實驗室以及湖南省多個研究平臺基地��。
(2)2018年12月����,項目組的《河鮮生----冷鏈物流運輸信息系統(tǒng)》獲小谷圍校級一等獎,完成了運輸實時監(jiān)控系統(tǒng)的初步設計����,其中包括溫濕度數(shù)據(jù)、GPS信息����、時間信息采集與顯示,信息發(fā)送至遠程服務器��。
(3)確定金屬鈉運輸過程的監(jiān)控參數(shù)及傳感器子模塊的選用。
8.2.2尚缺少的條件及解決方法
(1)車載終端軟件和遠程中心軟件的研發(fā)與完善需要較強的專業(yè)知識�����,項目組成員將進行相關知識的學習與培訓��。
(2)數(shù)據(jù)通過CDMA模塊發(fā)送給遠程監(jiān)控中心這一過程尚缺乏足夠的實驗數(shù)據(jù)��,項目組后期將通過大量實驗確保其傳輸?shù)姆€(wěn)定性與準確性���。
(3)項目組成員缺乏危險品道路運輸?shù)膶崙?zhàn)經(jīng)驗�,計劃利用課余時間前往相關企業(yè)進行學習交流����,以保證后期的實驗更科學合理且貼合實際����。
(4)考慮到人員安全,實驗中金屬鈉的用量控制值尚待確定��,且所選道路運線要盡量貼合實際危險品運輸?shù)那闆r�����。
|