具有蛇形結構的電纜溝狀態(tài)巡檢機器人
2019年06月04日 20:41
所屬學院: [] 點擊:
湖南省大學生研究性學習和創(chuàng)新性實驗計劃
項 目 申 報 表
項目名稱:
如果您無法在線瀏覽此 PDF 文件,則可以 下載免費小巧的 福昕(Foxit) PDF 閱讀器,安裝后即可在線瀏覽 或 下載免費的 Adobe Reader PDF 閱讀器,安裝后即可在線瀏覽 或 下載此 PDF 文件
|
學校名稱
|
長沙理工大學
|
學生姓名
|
學 號
|
專 業(yè)
|
性 別
|
入 學 年 份
|
廖子涵
|
201524050418
|
電氣工程及其自動化
|
男
|
2015
|
臧文龍
|
201524050110
|
電氣工程及其自動化
|
男
|
2015
|
謝超
|
201524050117
|
電氣工程及其自動化
|
男
|
2015
|
彭禹堯
|
201524050624
|
電氣工程及其自動化
|
男
|
2015
|
嚴一帆
|
201530010218
|
電氣工程及其自動化
|
男
|
2015
|
指導教師
|
王旭紅
|
職稱
|
教授
|
項目所屬
一級學科
|
電氣工程
|
項目科類(理科/文科)
|
理科
|
學生曾經參與科研的情況
廖子涵:
(1) 2016年9月 創(chuàng)新實驗實驗室
(2) 2016年5月 電工杯數(shù)模競賽
(3) 2016年9月 國家計算機二級考試
臧文龍:
(1) 2016年5月 電工杯數(shù)模競賽
(2) 2016年9月 國家計算機二級考試
謝超:
(1) 2016年9月 國家計算機二級考試
|
指導教師承擔科研課題情況
湖南省科技計劃項目:2015GK3018電力系統(tǒng)GIS故障診斷方法研究及診斷系統(tǒng)研制
|
項目研究和實驗的目的����、內容和要解決的主要問題
研究目的
研制一種具有蛇形結構的狀態(tài)巡檢機器人,該機器人具備以下功能:
(1) 可以在狹小����、復雜的電纜溝內自主行走、攀爬越障
(2) 實現(xiàn)對電纜溝的實際運行狀態(tài)和運行環(huán)境的全面監(jiān)測
(3) 通過智能化聯(lián)動控制機制�,實現(xiàn)潛在隱患和警情的及時處理
研究內容
(1) 蛇形機器人的總體結構設計,如圖1
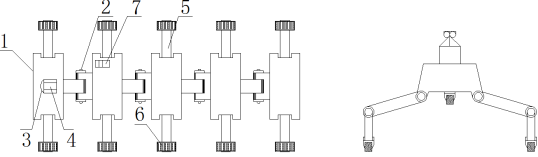
1.機器人軀體 2.軀體轉向關節(jié) 3.云臺 4.視頻監(jiān)測裝置 5.機器人行走臂6. 行走輪7.傳感器
圖1蛇形巡檢機器人結構
(2) 蛇形機器人的運動建模與協(xié)調控制方法�,如圖2
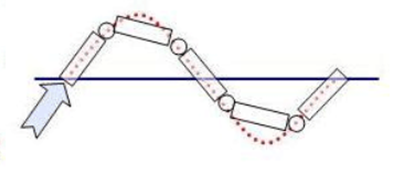
圖2 蛇形機器人的運動示意圖
(3)具有視、聽�����、嗅功能的機器人綜合感知系統(tǒng),如圖3�,4,5���,6

圖3基于紅外成像技術的電纜溫度檢測流程
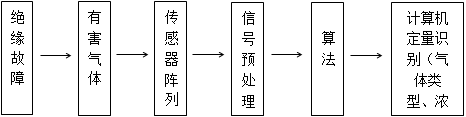
圖4基于電子鼻的絕緣故障檢測流程
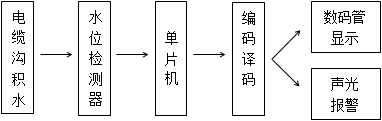
圖5積水檢測流程
(4)機器人的視覺導航與定位
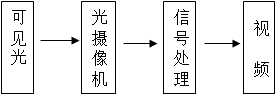
圖6光學成像過程
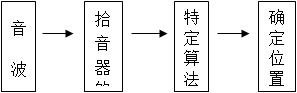
圖7噪音收集流程
(5)電纜溝運行狀態(tài)的智能評估方法
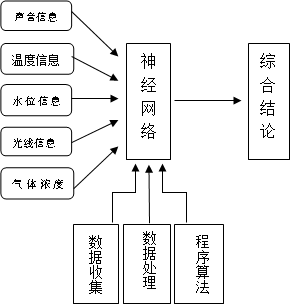
圖8智能評估系統(tǒng)
主要問題
(1)電纜溝狀態(tài)監(jiān)測的不足
(2)電纜溝內地形狹小復雜�,機器人難以運作
(3)電纜溝內的檢修維護工作難度大時間長
|
國內外研究現(xiàn)狀和發(fā)展動態(tài):
北京電力局在2007年開發(fā)了電力電纜接頭溫度遠程在線監(jiān)測網(wǎng)絡系統(tǒng)��,綜合采用計算機技術和數(shù)據(jù)通信技術���,具備了在線監(jiān)測電纜接頭的溫度變化的功能��,能夠在電纜發(fā)生燃爆前進行預測���,以確保電纜運行安全。然而��,該系統(tǒng)檢測點單一����,只能監(jiān)測溫度。2011年���,上海交通大學與上海東云信息技術發(fā)展有限公司共同開發(fā)了“電力電纜隧道計算機綜合監(jiān)控系統(tǒng)”�,該系統(tǒng)用于監(jiān)測電纜隧道中的電纜輸送量,溫度�,氣體和濕度等等,也提出了火災的自動預防與處理�����,但是���,它卻不具備智能性分析數(shù)據(jù)���,智能評估隧道狀況的功能����。2014年,山東聊城供電公司開發(fā)了輸電電纜綜合在線監(jiān)測預警系統(tǒng)�����,實現(xiàn)了電纜溝內的環(huán)境以及電纜運行狀態(tài)的在線實時監(jiān)測���。
在電纜狀態(tài)監(jiān)測領域��,國外較早開展研究��,2004年美國東部電力公司推出了名為“PCJMS(Power Cable Junction Monitoring System)”的電纜在線監(jiān)測系統(tǒng)�����。提出了一種在線評估接頭電阻和絕緣老化的算法����,通過電纜接頭的溫度變化來監(jiān)測電纜的運行故障,但該系統(tǒng)功能較為單一�����,綜合性差�����,無法對電纜環(huán)境中的濕度�����,氣體��,水位等其他因素進行綜合的監(jiān)測�。2008年,日本仙臺電力公司推出了電網(wǎng)故障綜合評估系統(tǒng),具備電纜線路狀況綜合評估功能�。該系統(tǒng)綜合性非常強,卻沒有提出如何自動排除險情的解決方案���。2013年���,美國Alfredo Vaccaro等人提出了一個智能電網(wǎng)的集成框架,簡稱Integrated Framework for Smart Microgrids��,該框架把對電纜溝的在線監(jiān)測與對設備的控制集合在一起�,從而達到狀態(tài)數(shù)據(jù)聯(lián)動控制設備的效果。該思路可行��,但未有具體的應用報道�����。
總之�,目前對電纜溝狀態(tài)監(jiān)測的報道����,大多集中于采用固定監(jiān)測設備對電纜溝井中某一參數(shù)或幾個參數(shù)進行測量,電纜溝長度大��,采用固定式布點監(jiān)測存在監(jiān)測盲區(qū),不能有效反映電纜的運行狀態(tài)�,而且,缺少數(shù)據(jù)分析�����,沒有真正在集控中心再現(xiàn)電纜溝的實際運行情況����,更沒有與排水、滅火�、通風、視頻監(jiān)視等系統(tǒng)進行聯(lián)動控制���,實現(xiàn)電纜溝內潛在隱患和警情的及時處理與排除����,其應用效果受到很大限制��。
目前��,國內外正采用機器人開展架空輸電線路和變電站巡檢��,而將機器人應用于電纜溝狀態(tài)監(jiān)測則缺少報道��,電纜溝存在空間小、環(huán)境差���、障礙多等特點���,常規(guī)的輪式、履帶式機器人難以正常工作�,若能研制一種具有蛇形結構的靈巧智能巡檢機器人,彌補上述監(jiān)測方法的不足���,將具有很好的應用前景�。
|
本項目學生有關的研究積累和已取得的成績
1�、 已查閱了相關資料,明確了工作過程
2���、 將工作原理制成圖表便于理清思路
3�����、 學習了單片機和傳感器的相關知識如電子鼻的工作過程
4、 學習了電機及其控制的相關知識
|
項目的創(chuàng)新點和特色
1��、 在電纜溝的復雜環(huán)境下�����,研究基于視覺的電纜溝行走路線識別、障礙物檢測與導航避障控制�,解決巡檢機器人的導航、定位問題�����。
2�、 創(chuàng)建具有視、聽�、嗅功能的機器人綜合感知系統(tǒng)。
3�����、 對電纜溝運行狀態(tài)的智能評估
|
項目的技術路線及預期成果
1���、技術路線
(1) 蛇形機器人的總體結構設計
研究具有多節(jié)軀體����、軀體安裝履帶式行走輪���、各節(jié)軀體通過兩自由度轉向關節(jié)連接的蛇形機器人綜合構型��,通過對軀體行走電機�����、關節(jié)轉向電機的控制�,可實現(xiàn)機器人在電纜溝內水平爬行、直角拐彎�����、豎立攀爬越障和全方位的電纜檢測�����。
分析機器人的受力情況��,以受力均衡為準則�,研究紅外和可見光視頻檢測裝置、各類傳感器�、無線數(shù)據(jù)傳輸裝置、蓄電池等在機器人上的布置�����。
蛇形巡檢機器人的總體結構如圖1所示: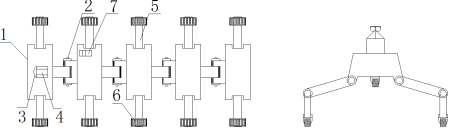
圖9蛇形巡檢機器人的總體結構
1.機器人軀體 2.軀體轉向關節(jié) 3.云臺 4.視頻監(jiān)測裝置 5.機器人行走臂6. 行走輪7.傳感器
(2) 蛇形機器人的運動控制
根據(jù)電纜溝的地形�、地貌,研究蛇形機器人各軀體行走輪電機�����、關節(jié)轉向電機的整體協(xié)調控制方法����,實現(xiàn)機器人的精準運動控制。
(3) 建立具有視��、聽��、嗅功能的機器人綜合感知系統(tǒng)
根據(jù)電纜運行特性�����,建立具有視���、聽���、嗅功能的機器人綜合感知系統(tǒng),其中視覺感知采用熱成像和可見光成像相結合�;聽覺感知采用拾音器用于測量電纜設備噪聲,通過基于聲源的定位方法�,計算息采集的延遲和幾何關系以判斷聲源位置�����、強度和方向���;嗅覺檢測電纜運行所發(fā)出的異味,采用具有嗅覺功能的電子鼻結構�����,對電纜異味形成連續(xù)不斷的檢測�����?��;谝陨隙鄠鞲衅餍畔⑷诤系木C合感知系統(tǒng)�����,可對電纜狀態(tài)進行全方位的快速感知和識別�����。
(4)機器人的視覺導航與定位
在電纜溝的復雜環(huán)境下�,靈活、精確的機器人導航與自定位是一大難題���,為此本項目將開展基于視覺的電纜溝行走路線識別、障礙物檢測與導航避障控制的研究�,力圖解決巡檢機器人的導航、定位問題��。
(5)電纜溝運行狀態(tài)的智能評估方法
根據(jù)獲取的電纜溝狀態(tài)數(shù)據(jù)����,研究基于多傳感器信息融合方法,建立智能化的數(shù)據(jù)分析系統(tǒng)�,對電纜溝道內整條電纜溫度的分布與變化、電纜絕緣情況��、報警類型與報警等級����,有無非法入侵、電纜設備外觀有無異常等電纜運行狀態(tài)做出有效的評估���。
2��、預期成果
(1)制做1臺電纜溝巡檢機器人���;
(2)撰寫項目研究技術報告:包括蛇形機器人的運動模模型及其控制方法���;蛇形機器人的視、聽����、嗅功能綜合感知系統(tǒng);蛇形機器人的智能評估����;
|
年度目標和工作內容(分年度寫)
2017年2月—2017年5月 :深入學習國內外研究現(xiàn)狀和發(fā)展動態(tài),結合當前實際做出設想��,制定工作目標計劃����,完善構思,充分做好前期準備工作�����。
2017月6月—2017年8月:重點學習蛇形機器人的運動模模型及其控制方法��,結合電纜溝中的實際情況,進行技術難點突破����。
2017年9月—2017年12月:重點設計蛇形機器人的視、聽�、嗅功能綜合感知系統(tǒng),使用各類知覺的相應技術���,對蛇形機器人的“感知神經中樞”進行設計制作。
2018年1月—2018年2月:重點制成蛇形機器人的智能評估系統(tǒng)����,將從電纜溝中獲取的狀態(tài)數(shù)據(jù)進行處理和有效評估。
2018年3月—2018年4月:總結項目成果�����,撰寫研究報告���。
|
指導教師意見
簽字: 日期:
|