2.2 Hoap-2人形機(jī)器人

圖1.3
如圖1.3所示�����,2013年����,Sugiyama S等在紐約斯普林格發(fā)表了最新的研究成果,他們開發(fā)出了一個寫日文的人形機(jī)器人Hoap-2[3],它包含了一個使用虛擬觸覺接口的指令系統(tǒng)��,書寫軌跡便是由該指令系統(tǒng)給出����。Hoap-2人形機(jī)器人的亮點在于它是一款專用于寫字的機(jī)器人,而不僅限于機(jī)械臂上���,所以該機(jī)器人可以通過整體運動寫出比它體型大的字符�,拓展了傳統(tǒng)寫字機(jī)器人的應(yīng)用范圍�����。
3.1國內(nèi)發(fā)展概況
我國機(jī)器人領(lǐng)域起步較晚�,在機(jī)器人技術(shù)方面也遠(yuǎn)遠(yuǎn)落后于國際先進(jìn)水平。我國從上世紀(jì)八十年代才開始展開對機(jī)器人的研究�����,當(dāng)時的覆蓋面較小����,僅有部分高校和科研單位參與研究,發(fā)展速度比較緩慢����。1985年后,國家將機(jī)器人技術(shù)列入國家發(fā)展計劃��,特別是在國家第七��、八�、九個“五年計劃”和“863”高新技術(shù)發(fā)展計劃的重點支持下,我國的機(jī)器人在近30年取得了不少優(yōu)秀的科研成果��。通過查閱資料發(fā)現(xiàn)�����,在世界工業(yè)機(jī)器人產(chǎn)業(yè)全球前十五位重要專利申請人中,有11位來自日本企業(yè)����,而我國的專利申請則無一上榜,這表明我國的機(jī)器人技術(shù)實力較國際頂尖水平還存在很大的差距����,同時也說明了我國在機(jī)器人技術(shù)領(lǐng)域還有很大的發(fā)展前景和研究價值���。
雖然我國機(jī)器人技術(shù)的綜合水平遠(yuǎn)落后于國際領(lǐng)先水平,但是在書法機(jī)器人這一領(lǐng)域的應(yīng)用還是有相當(dāng)多的亮點��,這可能是得益于我們幾千年的文化積淀。筆者選擇了兩款國內(nèi)自主研發(fā)的���、具有標(biāo)志意義的書法機(jī)器人在下文進(jìn)行圖文介紹�����。
3.2機(jī)器人書法大師

圖1.4
2000年,北京航空航天大學(xué)的景興碧教授等開發(fā)了我國第一臺專門用于中國軟筆書法的機(jī)器人——“機(jī)器人書法大師”。[4]該軟筆書法機(jī)器人系統(tǒng)是為中國科學(xué)技術(shù)館二期工程而研制的展品之一,可自動完成換筆����、上紙、潤筆��、書寫、蓋章及切紙等動作��。軟筆書法機(jī)器人系統(tǒng)啟動后,可以在電腦屏幕上選擇機(jī)器人書寫的內(nèi)容(該內(nèi)容必須是機(jī)器人書寫字庫中的文字)。值得一提的是�,字庫中的每一個文字都可以選擇不同的字體,該書法機(jī)器人支持楷書����、隸書�����、草書��、魏碑等字體。該機(jī)器人可根據(jù)所選擇的書寫字?jǐn)?shù)的多少,自動確定字體的大小和版式(橫排或豎排) ,以保證書寫作品完整�、美觀�。還有一大亮點便是,在連續(xù)書寫一段時間后,機(jī)器人能夠自動完成潤筆等動作。在書寫完成后,機(jī)器人會將毛筆放回毛筆架上,然后抓取印章,為所書作品蓋章。整個流程完全自動化,無需人介入輔助����,完成了人類書寫過程中的絕大部分細(xì)節(jié)。
3.3 Callibot書法機(jī)器人
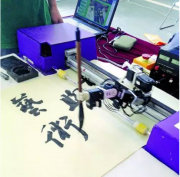
圖1.5
2013年12月, 在中國深圳召開的IEEE機(jī)器人與仿生學(xué)國際會議上�����,孫遠(yuǎn)東�����、徐揚生教授在會議上介紹了他們最近的研究成果——Callibot書法機(jī)器人�����,它是由一個6自由度機(jī)器人臂���、一條直線軌道和一個送紙器組成[5]。Callibot機(jī)器人相較以往書法機(jī)器人,大大擴(kuò)大了手臂的工作空間��,很大程度是提高了書寫軌跡精度。它采用的是一種演示回放方式�����,機(jī)器人的動作如同人寫字一般流暢瀟灑。這不僅能增強其觀賞效果,還能增添更多的審美趣味����。機(jī)器人與人類最大的區(qū)別在于機(jī)器人能夠準(zhǔn)確地記錄演示動作。因此��,雖然Callibot沒有任何的學(xué)習(xí)過程�����,但是它能夠?qū)憰鴮懗鲇兴囆g(shù)感的書法字�����。如圖1.5所示 ,Callibot書法機(jī)器人能夠?qū)懗鲆环薮蟮木哂兴囆g(shù)感書法作品。
4.總結(jié)
書法機(jī)器人著重于對機(jī)器人手臂的控制,這樣更接近人們對于智能機(jī)器人“手”的控制期望��。伴隨著智能機(jī)器人的發(fā)展����,人們更加期望機(jī)器人能夠通過不斷學(xué)習(xí)來完成復(fù)雜的寫字工作,其重點在于學(xué)習(xí)��,能夠讓機(jī)器人通過學(xué)習(xí)來完成復(fù)雜書寫動作的控制也成為了近年來的研究熱點����。書法是一項手眼協(xié)調(diào)的工作�����,而機(jī)器人手眼協(xié)調(diào)的發(fā)展一直伴隨著智能機(jī)器人的發(fā)展����,在嘗試對書法機(jī)器人寫毛筆字改進(jìn)和提高的過程中���,也勢必會促進(jìn)智能機(jī)器人的發(fā)展和研究。
2.參考文獻(xiàn)
[1] 余德泉.國內(nèi)外工業(yè)機(jī)器人發(fā)展現(xiàn)狀與趨勢[J].大眾用電,2017,32(09):20-21.
[2] Nico Huebel, Elias Mueggler, Markus Waibel, and Raffaello D’Andrea. Towards Robotic Calligraphy[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura, Algarve, Portugal , 2012.
[3] Sugiyama S, Oshita I, Yoshikawa T. Japanese calligraphy using whole body motion of a humanoid robot[M]//Intelligent Technologies and Engineering Systems. Springer New York,2013:345-355
[4] 景興碧,萬仁明,張以都,李秀琴.軟筆書法機(jī)器人[J].機(jī)器人技術(shù)與應(yīng)用,2000(06):21-23.
[5] Yuandong Sun and Yangsheng Xu: A Calligraphy Robot- Callibot: Design, Analysis and ApplicationsInternational [C]/ /Proceedings of the IEEE Conference on Robotics and Biomimetics (ROBIO) Shenzhen, China, December 2013
[6] 宮曉博,王建平.IRB140型工業(yè)機(jī)器人連續(xù)軌跡控制的漢字繪制[J].現(xiàn)代制造工程,2010(02):135-137.
[7]曾興吉.機(jī)器人技術(shù)在毛筆書法中的應(yīng)用研究[J].科技創(chuàng)新與應(yīng)用,2018(31):152-153.
[8] 杜同春. 寫字機(jī)器人感知與推理方法研究[D].哈爾濱工程大學(xué),2017.
[9] 俞凱. 計算機(jī)書法若干關(guān)鍵技術(shù)研究[D].浙江大學(xué),2010.
[10] 曾華琳,黃雨軒,晁飛,周昌樂.書寫機(jī)器人研究綜述[J].智能系統(tǒng)學(xué)報,2016,11(01):15-26.
[11] 張學(xué)文,陳小安,梁錫昌.寫字機(jī)器人運動學(xué)分析及仿真[J].現(xiàn)代制造工程,2009(10):142-145.
[12] 黃雨軒. 智能機(jī)器人自主書寫方法的研究[D].廈門大學(xué),2017.
[13] 寧俤修,王中天,許曉飛.軟筆書寫機(jī)器人的研究與設(shè)計[J].電子技術(shù),2017,46(07):72-74.
[14] 王光建,梁錫昌.寫字機(jī)器人的文字矢量化及應(yīng)用[J].現(xiàn)代制造工程,2004(07):40-42.
[15] 曲波.一種具有環(huán)境自適應(yīng)能力的毛筆機(jī)器人[J].微型電腦應(yīng)用,2004(10):42-44+2-3.
[16] 于建均,門玉森,阮曉鋼,徐驄馳.在書寫任務(wù)中的基于軌跡匹配的模仿學(xué)習(xí)[J].北京工業(yè)大學(xué)學(xué)報,2016,42(08):1144-1152.
[17] 賴嘯.智能制造機(jī)器人機(jī)構(gòu)空間軌跡規(guī)劃和運動仿真設(shè)計[J].南方農(nóng)機(jī),2018,49(17):31+42.
[18] 閆林林,徐方,賈凱,鄒風(fēng)山.Delta機(jī)器人運動控制及圖形軌跡的動態(tài)仿真[J].計算機(jī)工程與設(shè)計,2015,36(08):2196-2200.
(五) 創(chuàng)新點與項目特色
1.機(jī)器自主學(xué)習(xí)
通過筆畫自主生成算法�,實現(xiàn)機(jī)器人的自主筆畫學(xué)習(xí)并書寫漢字,在“看到”新的漢字(字庫中沒有的)漢字之后�����,像人類一樣通過已經(jīng)學(xué)會的筆畫將這個漢字書寫出來�����,并能有自己的風(fēng)格����。
2.模仿學(xué)習(xí)
漢字的書寫過程中涉及了很多重復(fù)性的筆畫運動�����,因此可以利用在先前相同筆畫運動軌跡中收集得到的數(shù)據(jù)來優(yōu)化后面的筆畫����。
3.智能控制
加入語音識別系統(tǒng)�,可以通過人的聲音來控制書法機(jī)器人的書寫內(nèi)容和字體風(fēng)格。
4.書法作品的布局與呼應(yīng)
在真正的書法作品中�����,書法字的排布是錯落有致的����,同時前后書法字之間往往有一些呼應(yīng)關(guān)系,如何表達(dá)這些呼應(yīng)關(guān)系從而得到更美觀的書法字布局將是一項非常有意義的研究��。
(六) 技術(shù)路線��、擬解決的問題及預(yù)期成果
主要問題:
1.書寫效果單一
就目前的書法機(jī)器人而言�,基本上都能夠自主書寫出具有美感的書法字,書寫軌跡精度相較初代書法機(jī)器人有了極大的提升����。但是��,現(xiàn)有的各類書法機(jī)器人都存在一定的局限性����。采用對現(xiàn)有字庫進(jìn)行編程的書法機(jī)器人�����,則只能書寫字庫中的漢字��,且書寫效果單一����。
2.書寫較多時出現(xiàn)問題
當(dāng)它書寫字?jǐn)?shù)較多的作品時����,便會出現(xiàn)兩個問題:
(1)PC端處理速度太慢,需要很長的時間規(guī)劃書寫軌跡�,甚至部分字出錯。
(2)作品沒有整體藝術(shù)感����。
3.書法水平及延展應(yīng)用方面受限
跟隨書寫機(jī)器人需要依靠人的介入輔助,并不能很好地體現(xiàn)機(jī)器人自主書寫的能力,其書寫效果很大程度上取決于書寫者的書法水平�,筆畫難以通過自主學(xué)習(xí)來進(jìn)行自我優(yōu)化。這種模仿式�、非完全自主的書法機(jī)器人不適用于較重的或大型的機(jī)械臂,所以在延展應(yīng)用方面也更為局限�����。
(七) 項目研究進(jìn)度安排
(一)準(zhǔn)備階段
1.2019年3月�����,熟悉OpenCV軟件��、課題任務(wù)及要求����。
2.2019年4月,查閱60篇以上有關(guān)delta機(jī)器人���、書寫機(jī)器人的中英文文獻(xiàn)資料���。
3.2019年6月至2019年10月,基于所查閱的相關(guān)文獻(xiàn)資料��,完成文獻(xiàn)綜述,并讓老師指導(dǎo)審閱�。
(二)設(shè)計階段
4.2019年10月,熟悉草書的書寫方法和要旨�。
5.2019年10月至2020年1月,完成草書字庫的設(shè)計�。
6.2020年1月,建立數(shù)學(xué)模型��,研究書寫筆畫寬度與按筆深度�����、筆尖停留時間之間的函數(shù)關(guān)系�。
7.2020年2月,完成草書機(jī)器人算法的設(shè)計以及書寫功能的實現(xiàn)�����。
8.2020年3月����,對草書機(jī)器人進(jìn)行測試并完成專利和論文的初稿�。
(三)答辯階段
9.2020年4月,完成專利和論文定稿���。
10.2020年5月����,制作PPT并準(zhǔn)備答辯、結(jié)題����。
(八) 已有基礎(chǔ)
1. 與本項目有關(guān)的研究積累和已取得的成績
1.參加“塞伯睿創(chuàng)業(yè)團(tuán)隊”,具備機(jī)器人操作經(jīng)驗教訓(xùn)��;
2.參加校級實驗室組織的全國大學(xué)生電子設(shè)計競賽訓(xùn)練�����,具備軟硬件設(shè)計能力���。
2. 已具備的條件�,尚缺少的條件及解決方法
已具備的條件:DELTA機(jī)器人及其編程接口
尚缺少的條件:草書書寫規(guī)律及軌跡算法
解決方法:調(diào)研�����、重新建模分析����,歸納總結(jié)����,提取成為字庫��,然后按照規(guī)律進(jìn)行字庫重建��,以期達(dá)到目標(biāo)����。
|