1.研究背景
1.1我國(guó)柑橘產(chǎn)量現(xiàn)狀及預(yù)測(cè)
我國(guó)柑橘的產(chǎn)量�,自2007年以來(lái)一直呈增長(zhǎng)態(tài)勢(shì)。從2007年至2017年的11年間柑橘產(chǎn)量連續(xù)增加�,分別由2058.3萬(wàn)噸增加至3 816.8萬(wàn)噸(如圖1所示),每年平均增加159.86萬(wàn)噸����。到2020年預(yù)計(jì)柑橘產(chǎn)量略有增加,產(chǎn)量增加到4 100萬(wàn)噸左右[1]�。

圖1 2007年-2017年我國(guó)柑橘產(chǎn)量統(tǒng)計(jì)圖
1.2我國(guó)柑橘采摘與其面臨的問題
在我國(guó),每到柑橘收獲季節(jié)���,都有大量的柑橘需要在短期內(nèi)采摘��。而目前的柑橘采摘工作依然主要依靠人工完成���,工作量大����,工作強(qiáng)度高���。但是��,隨著人口老齡化以及農(nóng)村青壯年勞動(dòng)力人口向城市轉(zhuǎn)移�����,柑橘采摘工人數(shù)量與質(zhì)量均出現(xiàn)下滑����。我國(guó)柑橘生產(chǎn)迫切需要自動(dòng)化的采摘設(shè)備�。
2.研究的目的與意義
在果蔬生產(chǎn)作業(yè)中,采摘效率低�����,費(fèi)用占成本的比例約為50% ~70%�����,并且作業(yè)的質(zhì)量直接影響到果蔬的儲(chǔ)存、加工及銷售[2]����。目前,國(guó)內(nèi)的果蔬采摘基本上采用手工方式.隨著人口老齡化以及農(nóng)村青壯年勞動(dòng)力人口向城市轉(zhuǎn)移��,迫切需要自動(dòng)化的采摘設(shè)備��。但是果蔬的生長(zhǎng)隨時(shí)空環(huán)境的變化而變化����,存在非結(jié)構(gòu)性和不確定性����,果實(shí)嬌嫩、果梗堅(jiān)硬���、果實(shí)青熟夾雜并且枝葉茂密�,工作環(huán)境復(fù)雜���,這些都制約著自動(dòng)采摘設(shè)備的研發(fā)[3]?��,F(xiàn)在國(guó)內(nèi)外的果蔬采摘機(jī)器人的主要工作目標(biāo)多為非結(jié)構(gòu)性和不確定性較小的果蔬�����,諸如西紅柿[4,5]�、黃瓜[6]����、茄子[7]、櫻桃���、草莓[8]���、蘋果[9]葡萄[10]及蘑菇等,而柑橘因?yàn)楣6糖夷举|(zhì)化程度高�����,較為堅(jiān)硬[11]���,果實(shí)青熟夾雜并且枝葉茂密易造成對(duì)果實(shí)的遮擋��,因此���,以此為采摘目標(biāo)的機(jī)器人較少����。因此����,本項(xiàng)目提出一種基于深度卷積神經(jīng)網(wǎng)絡(luò)的智能柑橘采摘機(jī)器人設(shè)計(jì),包括視覺識(shí)別系統(tǒng)和末端執(zhí)行器設(shè)計(jì),實(shí)現(xiàn)自動(dòng)檢測(cè)柑橘成熟度并自行采摘的預(yù)期目標(biāo)���,以期代替人工勞動(dòng)�,一是將人從繁雜勞累的柑橘采摘過程中解放出來(lái);二是提高柑橘采摘效率����、降低柑橘生產(chǎn)的成本����,增加果農(nóng)收入;三是保證柑橘品質(zhì)����;四是在人口老齡化趨勢(shì)日益嚴(yán)重��、農(nóng)村青壯年勞動(dòng)力不斷向城市轉(zhuǎn)移的時(shí)候���,彌補(bǔ)農(nóng)村勞動(dòng)力的不足;五是加快農(nóng)業(yè)生產(chǎn)自動(dòng)化的進(jìn)程。
3.研究?jī)?nèi)容
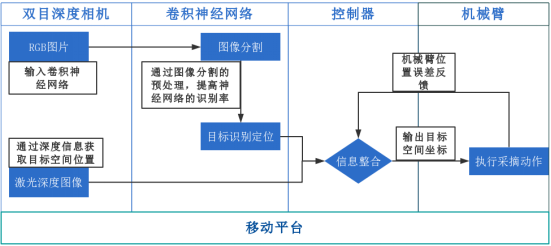
整體流程梗概
3.1系統(tǒng)硬件部分
3.1.1機(jī)械臂結(jié)構(gòu)設(shè)計(jì)
就農(nóng)作物采摘而言����,采摘的執(zhí)行效果非常依賴于機(jī)械臂的結(jié)構(gòu)設(shè)計(jì)與控制。對(duì)于植株式的柑橘�����,其果實(shí)在空間上的分布較為立體且極具隨機(jī)性,因此串聯(lián)型多自由度機(jī)械臂較適合這樣的工作環(huán)境�����,結(jié)構(gòu)可參考ABB IRB 4600型號(hào)機(jī)械臂,如圖2所示����,最終能滿足機(jī)械臂采摘工作的所需的精度與強(qiáng)度。
3.1.2采摘末端結(jié)構(gòu)設(shè)計(jì)
末端執(zhí)行器安裝在機(jī)械手的末端����,其功能類似于人手�����,是直接與目標(biāo)物體接觸的部件。在末端執(zhí)行器設(shè)計(jì)之前�����,不僅需要研究工作對(duì)象的物理特性(物體大小����、體積����、形狀、重量)和機(jī)械特性(摩擦阻力、剪切阻力等),還包括生物學(xué)特性等�。末端執(zhí)行器的形式主要有吸盤式(真空式吸盤、噴射式負(fù)壓吸盤����、擴(kuò)散式負(fù)壓吸盤����、擠壓排氣式吸盤�����、電磁式吸盤等)���、針式����、噴嘴式�、杯狀�����、多關(guān)節(jié)手爪式�����、順應(yīng)型指結(jié)構(gòu)等�,如圖3所示,通常是末端執(zhí)行器都是專用的�����,最終����,能夠在在不對(duì)果實(shí)造成創(chuàng)傷的情況下�����,實(shí)現(xiàn)果實(shí)的有效分離���。
3.1.3深度相機(jī)類型
實(shí)現(xiàn)采摘,目標(biāo)的檢測(cè)與空間定位��,則是本項(xiàng)目的核心��。實(shí)際生產(chǎn)環(huán)境下場(chǎng)景可能偏復(fù)雜��,自然光條件多變�����,因此���,我們需要一個(gè)分辨率較高��,同時(shí)對(duì)自然環(huán)境下有一定抗干擾的能力的深度相機(jī)方案�,以進(jìn)行后續(xù)圖像分割,識(shí)別��,跟蹤等方面的工作���。目前市場(chǎng)的主要的:1�����、雙目方案2、TOF方案抗3���、結(jié)構(gòu)光方案 以及方案對(duì)比��,如圖4所示�。
1�、結(jié)構(gòu)光方案優(yōu)勢(shì)在于技術(shù)成熟,深度圖像分辨率可以做得比較高�,但容易受光照影響,室外環(huán)境基本不能使用
2��、TOF方案抗干擾性能好����,視角更寬,不足是深度圖像分辨率較低,做一些簡(jiǎn)單避障和視覺導(dǎo)航可以用��,不適合高精度場(chǎng)合���。受環(huán)境影響小��,傳感器芯片并不成熟�����,成本很高����,實(shí)現(xiàn)量產(chǎn)困難����。
3、雙目方案����,成本相對(duì)前面兩種方案最低,但是深度信息依賴純軟件算法得出�,此算法復(fù)雜度高,難度很大����,處理芯片需要很高的計(jì)算性能�,同時(shí)它也有普通RGB攝像頭的缺點(diǎn):在昏暗環(huán)境下以及特征不明顯的情況下并不適用
在本項(xiàng)目中���,雙目方案得到的圖像分辨率更高����,而我們則希望通過圖像分割和相關(guān)深度學(xué)習(xí)模型來(lái)彌補(bǔ)其精度上的不足�。
圖2 IRB 4600型號(hào)機(jī)械臂 圖3 順應(yīng)型指結(jié)構(gòu) 圖4雙目,TOF,結(jié)構(gòu)光三種深度相機(jī)對(duì)比
3.2系統(tǒng)軟件部分
3.2.1機(jī)械臂運(yùn)動(dòng)控制
結(jié)合MATLAB Robotics toolbox工具箱對(duì)檢測(cè)到的空間坐標(biāo)進(jìn)行逆運(yùn)動(dòng)求解。我們采用的機(jī)械臂結(jié)構(gòu)滿足Pieper準(zhǔn)則即:機(jī)器人的三個(gè)相鄰關(guān)節(jié)軸交于一點(diǎn)或三軸線平行����。因此若采用六自由度結(jié)構(gòu)可求出唯一逆解����。結(jié)合果實(shí)的空間分布范圍,將單次抓取范圍限定在2m*1m范圍內(nèi)��,如圖5所示�,由MATLAB建模如下,運(yùn)行效果如圖6:
L1 = Link('d', 1, 'a', 0, 'alpha', 0,'offset',pi/4);
L2 = Link('d', 0, 'a', 0, 'alpha', pi/2,'offset',pi/4);
L3 = Link('d', 0, 'a', 1, 'alpha', 0,'offset',pi/4);
L4 = Link('d', 0, 'a', 1, 'alpha', 0,'offset',pi/2);
L5 = Link('d', 0, 'a', 1, 'alpha', 0,'offset',0);
b=isrevolute(L1); %Link 類函數(shù)
robot=SerialLink([L1,L2,L3,L4,L5]); %SerialLink 類函數(shù)
robot.display(); %Link 類函數(shù)theta=[0,0,0,0,pi/4];
robot.plot(theta); %SerialLink 類函
以機(jī)械臂底座為坐標(biāo)標(biāo)系原點(diǎn)��,得到目標(biāo)的適當(dāng)夾取姿態(tài)后��,即可通過MATLAB快速求得逆解,實(shí)現(xiàn)夾取��。
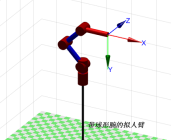 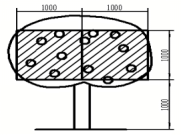
圖5單次抓取范圍 單位mm 圖6 robotics 工具箱仿真
3.2.2深度相機(jī)的誤差處理以及像素匹配
實(shí)現(xiàn)采摘���,最重要的就是深度信息的獲取�。雙目攝像頭在理想情況下可假定兩個(gè)成像平面平行�����,但實(shí)際上兩攝像頭的極平面并不平行���,而造成得到的深度信息存在誤差�,因此在計(jì)算深度信息之前需要對(duì)同時(shí)獲取的圖像進(jìn)行校正與匹配�����。目前可以參考的矯正方法:通過分別對(duì)兩張圖片用單應(yīng)(homography)矩陣變換(可以通過標(biāo)定獲得圖8)�����,把兩個(gè)不同方向的圖像平面(圖8中灰色平面)重新投影到同一個(gè)平面且光軸互相平行(圖8中黃色平面)�,以此來(lái)逼近理性的平行情況。
雙目相機(jī)的像素匹配精度高低���,也會(huì)影響實(shí)際的目標(biāo)定位效果�。像素點(diǎn)過少比較匹配起來(lái)魯棒性很差,很容易受到光照變化和視角不同的影響����,那么,可以參考幾個(gè)匹配算法��。1基于滑動(dòng)窗口的圖像匹配�,如圖9。對(duì)于左圖中的一個(gè)像素點(diǎn)(圖9左圖中紅色方框中心)�����,在右圖中從左到右用一個(gè)同尺寸滑動(dòng)窗口內(nèi)的像素和它計(jì)算相似程度,相似度的度量有很多種方法�����,比如 誤差平方和法(Sum of Squared Differences�,簡(jiǎn)稱SSD)�,圖9左右圖中兩個(gè)窗口越相似,SSD越小�����。圖9右下圖中的SSD曲線顯示了計(jì)算結(jié)果���,SSD值最小的位置對(duì)應(yīng)的像素點(diǎn)就是最佳的匹配結(jié)果�����。2基于能量?jī)?yōu)化的圖像匹配 這是基于能量?jī)?yōu)化的方法來(lái)實(shí)現(xiàn)匹配��。能量?jī)?yōu)化通常會(huì)先定義一個(gè)能量函數(shù)��。比如對(duì)于兩張圖中像素點(diǎn)的匹配問題來(lái)說(shuō)����,我們定義的能量函數(shù)如下圖7公式a ��。那么:
1�、在左圖中所有的像素點(diǎn)和右圖中對(duì)應(yīng)的像素點(diǎn)越近似越好,反映在圖像里就是灰度值越接近越好���,也就是下圖7公式b的描述��。
2�、在 同一張圖片里�,兩個(gè)相鄰的像素點(diǎn)視差(深度值)也應(yīng)該相近����。也就是圖7公式c的描述���。
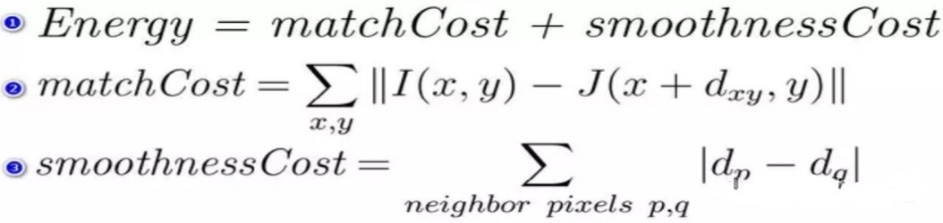
圖7 a���、b、c公式
通過對(duì)能量函數(shù)最小化�,我們最后能得到一個(gè)最佳的匹配結(jié)果。有了左右圖的每個(gè)像素的匹配結(jié)果�,根據(jù)前面的深度計(jì)算公式就可以得到每個(gè)像素點(diǎn)的深度值,最終得到一幅深度圖�。
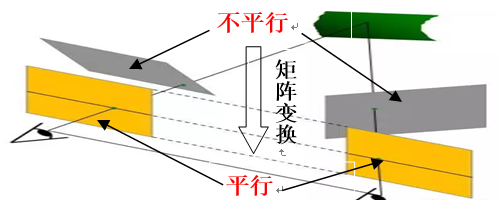
圖8 矩陣變換以達(dá)平衡
圖9基于滑動(dòng)窗口的圖像匹配
3.2.3基于卷積神經(jīng)網(wǎng)絡(luò)下圖片中的目標(biāo)識(shí)別
現(xiàn)如今許多優(yōu)秀的深度學(xué)習(xí)模型中總能發(fā)現(xiàn)卷積神經(jīng)網(wǎng)絡(luò)的影子,卷積神經(jīng)網(wǎng)絡(luò)是近年來(lái)深度學(xué)習(xí)能在計(jì)算機(jī)視覺中取得突破性成果的基石���。
如圖10所示����,LeNet-5是一個(gè)較簡(jiǎn)單的卷積神經(jīng)網(wǎng)絡(luò)����,輸入二維圖像�����,先經(jīng)過兩次卷積層到池化層,再經(jīng)過全連接層�����,最后使用softmax分類作為輸出層���。
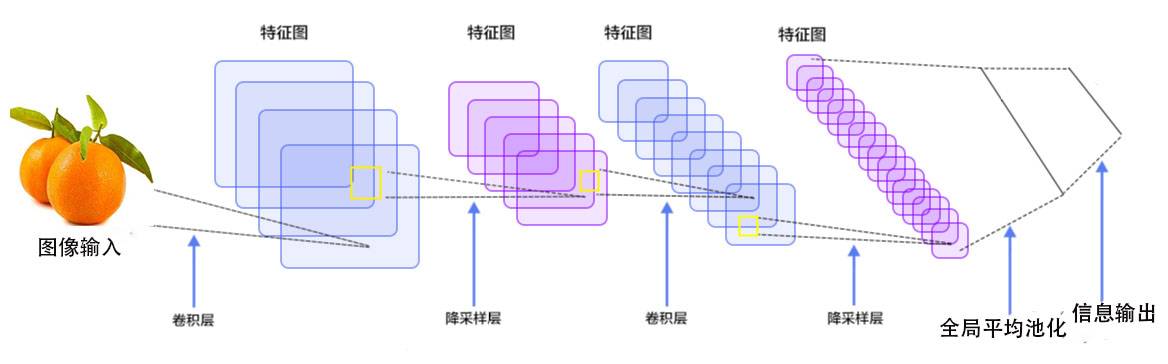
圖10 LeNet-5卷積神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)
卷積層
卷積層是卷積神經(jīng)網(wǎng)絡(luò)的核心基石�����。對(duì)二維圖像而言����,卷積簡(jiǎn)單的講就是二維濾波器滑動(dòng)到二維圖像上所有位置�����,并在每個(gè)位置上與該像素點(diǎn)及其領(lǐng)域像素點(diǎn)做內(nèi)積(如圖11���、12所示)�。不同的卷積核可以提取出圖像中不同的特征,如邊沿�,線性角等特征,因此在卷積神經(jīng)網(wǎng)絡(luò)中通過卷積操作可以提取出圖像低級(jí)到復(fù)雜的特征��。
圖11 卷積提取圖像特征����、濾波器與圖像對(duì)應(yīng)區(qū)域進(jìn)行內(nèi)積
池化層
池化是非線性下采樣的一種形式,主要作用是通過減少網(wǎng)絡(luò)的參數(shù)來(lái)減小計(jì)算量�,并且能夠在一定程度上控制過擬合。通常在卷積層的后面會(huì)加上一個(gè)池化層����。池化包括最大池化、平均池化等����。
總結(jié):卷積神經(jīng)網(wǎng)絡(luò)可以很好的利用圖像的結(jié)構(gòu)信息,高效地提取出圖像中的結(jié)構(gòu)信息����,同時(shí)卷積網(wǎng)絡(luò)參數(shù)較少,可以很好地訓(xùn)練和控制過擬合���。
3.3系統(tǒng)綜合運(yùn)行性能分析
本項(xiàng)目的核心在于對(duì)果實(shí)進(jìn)行較為準(zhǔn)確的空間定位��。將RGB圖像通過優(yōu)化后的卷積神經(jīng)網(wǎng)絡(luò),來(lái)對(duì)圖像中被遮擋果實(shí)進(jìn)行更準(zhǔn)確的識(shí)別����,同時(shí)結(jié)合深度相機(jī)返回的深度圖像����,二者疊加得到果實(shí)的空間位置���。通過增加不同光照環(huán)境下樣本的訓(xùn)練量���,能較好地克服自然光變化對(duì)深度相機(jī)成像的影響����,保證定位精度��。
在移動(dòng)平臺(tái)停止后,單次識(shí)別后的計(jì)劃采摘速度:20+pcs/min(個(gè)每分)��。
4. 面臨問題
很多國(guó)家對(duì)柑橘采摘機(jī)器人的研究都進(jìn)行了大量的工作并且取得了一定的成果, 但是柑橘采摘機(jī)器人仍然處于研究的階段�,并沒有達(dá)到商業(yè)化水平, 仍存在以下問題需要改進(jìn)���。
4.1 果實(shí)的識(shí)別率����、定位精度不高
目前識(shí)別果實(shí)主要有灰度閾值�、顏色色度法和幾何形狀特性等方法[12]�。其中, 前兩者主要基于果實(shí)的光譜反射特性, 但在自然光照情況下, 由于圖像中存在噪聲和各種干擾信息, 效果并不是很好���。采用形狀定位方式, 要求目標(biāo)具有完整的邊界條件, 由于水果和葉子等往往容易重疊在一起, 很難真正區(qū)別出果實(shí)的具體形狀, 這就會(huì)給機(jī)器臂末端執(zhí)行器抓取果實(shí)增加難度, 進(jìn)而影響果實(shí)的采摘成功率���。
4.2果實(shí)采摘效率較低�、損傷率較大
柑橘采摘機(jī)器人在實(shí)際工作過程中, 柑橘的生長(zhǎng)隨時(shí)空環(huán)境的變化而變化,存在非結(jié)構(gòu)性和不確定性����,果實(shí)青熟夾雜并且果樹枝葉茂密���,都會(huì)影響柑橘的采摘時(shí)間, 因此目前大多采摘機(jī)器人的效率不高����。
柑橘果實(shí)嬌嫩��、果梗堅(jiān)硬,采摘機(jī)器人采摘柑橘的方式一般是擰斷����、剪斷, 都是模仿人們?cè)谧匀坏貤l件下采摘[11]���。柑橘因?yàn)楣6糖夷举|(zhì)化程度高�,較為堅(jiān)硬���,現(xiàn)如今的采摘機(jī)器人雖然是智能控制, 但是也不可避免地會(huì)對(duì)果實(shí)造成內(nèi)部的擠壓變形以及表面的劃傷�����。所以需要更加適合于機(jī)器采摘的末端執(zhí)行機(jī)構(gòu)�。
5.解決的主要問題
5.1解決面對(duì)自然光變化和枝葉部分遮擋情況下的果實(shí)定位問題
在自然生長(zhǎng)情況下��,從單方向的角度觀察�����,多數(shù)果實(shí)往往被枝杈����、樹葉掩蓋,攝像機(jī)只能捕捉到果實(shí)的部分圖像��。而一般的方法難以準(zhǔn)確定位果實(shí)位置�����,這要求我們采用建立數(shù)學(xué)模型的方法�����,還原果實(shí)的輪廓,從而找到的果實(shí)的中心位置坐標(biāo)����。
果實(shí)的形狀�����、尺寸、顏色 ����、成熟度、表皮外傷程度差異性大, 而且果實(shí)總是隨機(jī)分布生長(zhǎng), 這給果實(shí)的識(shí)別帶來(lái)很大的困難����。目前識(shí)別果實(shí)的方法主要有灰度閾值、顏色識(shí)別法和區(qū)域識(shí)別法等����。前兩種方法都要基于果實(shí)的光譜反射特性, 因此還極易受到自然光照的影響 ��。而區(qū)域定位方式 , 則要求目標(biāo)具有完整的邊界條件 ,但是由于果實(shí)往往被枝干和葉子遮擋 ,很難真正區(qū)別出完整的輪廓 �����。我們?cè)诂F(xiàn)有方法的基礎(chǔ)上,采用建立柑橘形態(tài)數(shù)學(xué)模型與基于深度學(xué)習(xí)的圖像識(shí)別方法�����,綜合各方法的優(yōu)勢(shì)��,以期達(dá)到較好的定位效果�。
5.2機(jī)械臂末端采摘器的設(shè)計(jì)優(yōu)化
采摘機(jī)器人的運(yùn)動(dòng)部分主要包括輪式移動(dòng)平臺(tái)及其搭載的多自由度機(jī)械臂。
在實(shí)驗(yàn)室研發(fā)測(cè)試階段��,已有的輪式移動(dòng)平臺(tái)采用麥克納姆輪結(jié)構(gòu)����。該平臺(tái)需與相機(jī)反饋回來(lái)的柑橘位置信息運(yùn)動(dòng)調(diào)整,使目標(biāo)柑橘能處在機(jī)械臂的工作區(qū)域范圍之內(nèi)����。
機(jī)械臂主體部分保留,僅對(duì)末端執(zhí)行機(jī)構(gòu)進(jìn)行重新設(shè)計(jì)制作���,使其更加適用于柑橘的采摘工作���,達(dá)到高效采摘、不損傷果實(shí)的目的。在機(jī)械臂運(yùn)動(dòng)方面����,由于枝葉的覆蓋,除機(jī)器視覺系統(tǒng)需要準(zhǔn)確識(shí)別定位出果實(shí)所在的位置���,機(jī)械臂及其末端還應(yīng)能具體實(shí)現(xiàn)采摘?jiǎng)幼?��,尤其是如何繞開前方的枝葉、其它相鄰的果實(shí)等���。
|